Spline (mathematics)
This article includes a list of references, but its sources remain unclear because it has insufficient inline citations. (October 2017) (Learn how and when to remove this template message) |
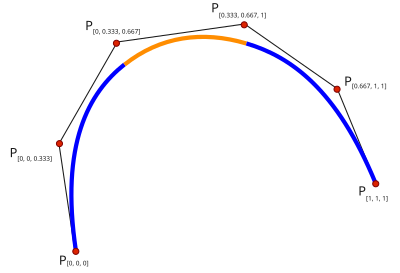
Single knots at 1/3 and 2/3 establish a spline of three cubic polynomials meeting with C2 continuity. Triple knots at both ends of the interval ensure that the curve interpolates the end points
In mathematics, a spline is a function defined piecewise by polynomials. In interpolating problems, spline interpolation is often preferred to polynomial interpolation because it yields similar results, even when using low degree polynomials, while avoiding Runge's phenomenon for higher degrees.
In the computer science subfields of computer-aided design and computer graphics, the term spline more frequently refers to a piecewise polynomial parametric curve[citation needed]. Splines are popular curves in these subfields because of the simplicity of their construction, their ease and accuracy of evaluation, and their capacity to approximate complex shapes through curve fitting and interactive curve design.[citation needed]
The term spline comes from the flexible spline devices used by shipbuilders and draftsmen to draw smooth shapes.[1] It also is an acronym for "Smooth Polynomial Lines Interpolating Numerical Estimates".
Contents
1 Introduction
2 Definition
3 Examples
3.1 Algorithm for computing natural cubic splines
4 Continuity levels
4.1 Natural continuity
4.2 Reduced continuity
4.3 Locally negative continuity
5 General expression for a C2 interpolating cubic spline
6 Representations and names
7 History
8 References
9 External links
Introduction
The term "spline" is used to refer to a wide class of functions that are used in applications requiring data interpolation and/or smoothing. The data may be either one-dimensional or multi-dimensional. Spline functions for interpolation are normally determined as the minimizers of suitable measures of roughness (for example integral squared curvature) subject to the interpolation constraints. Smoothing splines may be viewed as generalizations of interpolation splines where the functions are determined to minimize a weighted combination of the average squared approximation error over observed data and the roughness measure. For a number of meaningful definitions of the roughness measure, the spline functions are found to be finite dimensional in nature, which is the primary reason for their utility in computations and representation. For the rest of this section, we focus entirely on one-dimensional, polynomial splines and use the term "spline" in this restricted sense.
Definition
This article may be confusing or unclear to readers. (February 2009) (Learn how and when to remove this template message) |
The simplest spline is a piecewise polynomial function, with each polynomial having a single variable. The spline S takes values from an interval [a,b] and maps them to Rdisplaystyle mathbb R 
- S:[a,b]→R.displaystyle S:[a,b]to mathbb R .
![displaystyle S:[a,b]to mathbb R .](https://wikimedia.org/api/rest_v1/media/math/render/svg/408c93e305ecf563c2764bedf9f7365d206c3bf0)
Since S is piecewise defined, choose k subintervals to partition [a,b]:
- [ti,ti+1] , i=0,…,k−1displaystyle [t_i,t_i+1]mbox , i=0,ldots ,k-1
- [a,b]=[t0,t1]∪[t1,t2]∪⋯∪[tk−2,tk−1]∪[tk−1,tk]displaystyle [a,b]=[t_0,t_1]cup [t_1,t_2]cup cdots cup [t_k-2,t_k-1]cup [t_k-1,t_k]
- a=t0≤t1≤⋯≤tk−1≤tk=bdisplaystyle a=t_0leq t_1leq cdots leq t_k-1leq t_k=b
![displaystyle [t_i,t_i+1]mbox , i=0,ldots ,k-1](https://wikimedia.org/api/rest_v1/media/math/render/svg/89611da37419c8db1b71af0f552e396806d313ff)
![displaystyle [a,b]=[t_0,t_1]cup [t_1,t_2]cup cdots cup [t_k-2,t_k-1]cup [t_k-1,t_k]](https://wikimedia.org/api/rest_v1/media/math/render/svg/4cd1283f5ea6bce55811b7fa4dcbd746d1b5c4cb)

Each of these subintervals is associated with a polynomial Pi,
Pi:[ti,ti+1]→Rdisplaystyle P_i:[t_i,t_i+1]to mathbb R.
On the ith subinterval of [a,b], S is defined by Pi,
- S(t)=P0(t) , t0≤t<t1,displaystyle S(t)=P_0(t)mbox , t_0leq t<t_1,
- S(t)=P1(t) , t1≤t<t2,displaystyle S(t)=P_1(t)mbox , t_1leq t<t_2,
- ⋮displaystyle vdots
- S(t)=Pk−1(t) , tk−1≤t≤tk.displaystyle S(t)=P_k-1(t)mbox , t_k-1leq tleq t_k.




The given k+1 points tj (0 ≤ j ≤ k) are called knots. The vector
t=(t0,…,tk)displaystyle mathbf t =(t_0,dots ,t_k)
If the k polynomial pieces Pi each have degree at most n, then the spline is said to be of degree ≤ n (or of order ≤ n+1).
If for 1≤i≤k−1:S∈Cridisplaystyle 1leq ileq k-1;:;Sin C^r_i
of smoothness (at least) Cridisplaystyle C^r_i
A vector
r=(r1,…,rk−1)displaystyle mathbf r =(r_1,dots ,r_k-1)

Given a knot vector tdisplaystyle mathbf t 


tdisplaystyle mathbf t 
A knot ti can be "deleted" by moving it to equal another knot ti+1. The polynomial piece
Pi(t)
disappears, and the pieces
Pi−1(t) and Pi+1(t)
join with the sum of the continuity losses for
ti and ti+1.
That is,
S(t)∈Cn−ji−ji+1[ti=ti+1],displaystyle S(t)in C^n-j_i-j_i+1[t_i=t_i+1],where ji=n−ridisplaystyle j_i=n-r_i

This leads to a more general understanding of a knot vector. The continuity loss at any point can be considered to be the result of multiple knots located at that point, and a spline type can be completely characterized by its degree n and its extended knot vector
- (t0,t1,⋯,t1,t2,⋯,t2,t3,⋯,tk−2,tk−1,⋯,tk−1,tk)displaystyle (t_0,t_1,cdots ,t_1,t_2,cdots ,t_2,t_3,cdots ,t_k-2,t_k-1,cdots ,t_k-1,t_k)

where ti is repeated ji times
for i=1,…,k−1displaystyle i=1,dots ,k-1
A parametric curve on the interval [a,b]
- G(t)=(X(t),Y(t)) , t∈[a,b]displaystyle G(t)=(X(t),Y(t))mbox , tin [a,b]
![displaystyle G(t)=(X(t),Y(t))mbox , tin [a,b]](https://wikimedia.org/api/rest_v1/media/math/render/svg/693bd2eae6b680808285a8ce4c1a23e0ed6d04ef)
is a spline curve if both X and Y are spline functions
of the same degree with the same extended knot vectors on that interval.
Examples
Suppose the interval [a,b] is [0,3] and the subintervals are [0,1], [1,2], and [2,3]. Suppose the polynomial pieces are to be of degree 2, and the pieces on [0,1] and [1,2] must join in value and first derivative (at t=1) while the pieces on [1,2] and [2,3] join simply in value (at t = 2).
This would define a type of spline S(t) for which
- S(t)=P0(t)=−1+4t−t2 , 0≤t<1displaystyle S(t)=P_0(t)=-1+4t-t^2mbox , 0leq t<1
- S(t)=P1(t)=2t , 1≤t<2displaystyle S(t)=P_1(t)=2tmbox , 1leq t<2
- S(t)=P2(t)=2−t+t2 , 2≤t≤3displaystyle S(t)=P_2(t)=2-t+t^2mbox , 2leq tleq 3



would be a member of that type, and also
- S(t)=P0(t)=−2−2t2 , 0≤t<1displaystyle S(t)=P_0(t)=-2-2t^2mbox , 0leq t<1
- S(t)=P1(t)=1−6t+t2 , 1≤t<2displaystyle S(t)=P_1(t)=1-6t+t^2mbox , 1leq t<2
- S(t)=P2(t)=−1+t−2t2 , 2≤t≤3displaystyle S(t)=P_2(t)=-1+t-2t^2mbox , 2leq tleq 3



would be a member of that type.
(Note: while the polynomial piece 2t is not quadratic, the result is still called a quadratic spline. This demonstrates that the degree of a spline is the maximum degree of its polynomial parts.) The extended knot vector for this type of spline would be (0, 1, 2, 2, 3).
The simplest spline has degree 0. It is also called a step function. The next most simple spline has degree 1. It is also called a linear spline. A closed linear spline (i.e, the first knot and the last are the same) in the plane is just a polygon.
A common spline is the natural cubic spline of degree 3 with continuity C2. The word "natural" means that the second derivatives of the spline polynomials are set equal to zero at the endpoints of the interval of interpolation
- S″(a)=S″(b)=0.displaystyle S''(a),=S''(b)=0.

Algorithm for computing natural cubic splines
Cubic splines have polynomial pieces of the form Pi(x)=ai+bi(x−xi)+ci(x−xi)2+di(x−xi)3.displaystyle P_i(x)=a_i+b_i(x-x_i)+c_i(x-x_i)^2+d_i(x-x_i)^3.





P0(x0)=y0displaystyle P_0(x_0)=y_0quadand Pi−1(xi)=yi=Pi(xi),displaystyle quad P_i-1(x_i)=y_i=P_i(x_i),
- Pi−1′(xi)=Pi′(xi),displaystyle P'_i-1(x_i)=P'_i(x_i),
- Pi−1″(xi)=Pi″(xi),displaystyle P''_i-1(x_i)=P''_i(x_i),
- P0″(x0)=Pk−1″(xk)=0.displaystyle P''_0(x_0)=P''_k-1(x_k)=0.




One such polynomial Pidisplaystyle P_i




![[x_i,x_i+1]](https://wikimedia.org/api/rest_v1/media/math/render/svg/7138606cdb8eb7dddaba59b5aefe1ade6bc05a1b)
Computation of Natural Cubic Splines:
Input: a set of k+1displaystyle k+1
Output: a spline as a set of polynomial pieces, each represented by a 5-tuple.
- Create a new array a of size k + 1, and for i=0,…,kdisplaystyle i=0,ldots ,k
set ai=yidisplaystyle a_i=y_i
- Create new arrays b, d and μ each of size k
- Create a new array h of size k and for i=0,…,k−1displaystyle i=0,ldots ,k-1
set hi=xi+1−xidisplaystyle h_i=x_i+1-x_i
- Create a new array α of size k-1 and for i=1,…,k−1displaystyle i=1,ldots ,k-1
- Create new arrays c, l, and z each of size k+1displaystyle k+1
- Set l0=1,μ0=z0=0displaystyle l_0=1,;mu _0=z_0=0
- For i=1,…,k−1displaystyle i=1,ldots ,k-1,
- Set li=2(xi+1−xi−1)−hi−1μi−1.displaystyle l_i=2(x_i+1-x_i-1)-h_i-1mu _i-1.
- Set μi=hili.displaystyle mu _i=tfrac h_il_i.
- Set zi=αi−hi−1zi−1li.displaystyle z_i=tfrac alpha _i-h_i-1z_i-1l_i.
- Set li=2(xi+1−xi−1)−hi−1μi−1.displaystyle l_i=2(x_i+1-x_i-1)-h_i-1mu _i-1.
- Set lk=1;zk=ck=0.displaystyle l_k=1;z_k=c_k=0.
- For j=k−1,k−2,…,0displaystyle j=k-1,k-2,ldots ,0
- Set cj=zj−μjcj+1displaystyle c_j=z_j-mu _jc_j+1
- Set bj=aj+1−ajhj−hj(cj+1+2cj)3displaystyle b_j=tfrac a_j+1-a_jh_j-tfrac h_j(c_j+1+2c_j)3
- Set dj=cj+1−cj3hj.displaystyle d_j=tfrac c_j+1-c_j3h_j.
- Set cj=zj−μjcj+1displaystyle c_j=z_j-mu _jc_j+1
- Create the spline as a new set of polynomials and call it output_set. Populate it with k 5-tuples for the polynomials P.
- For i=0,…,k−1displaystyle i=0,ldots ,k-1
- Set Pi,a = ai
- Set Pi,b = bi
- Set Pi,c = ci
- Set Pi,d = di
- Set Pi,x = xi
- Output output_set













Continuity levels
If sampled data from a function or a physical object are available, spline interpolation is an approach to creating a spline that approximates those data.
Natural continuity
The classical spline type of degree n used in numerical analysis has continuity
- S(t)∈Cn−1[a,b],displaystyle S(t)in mathrm C ^n-1[a,b],,
![displaystyle S(t)in mathrm C ^n-1[a,b],,](https://wikimedia.org/api/rest_v1/media/math/render/svg/1de1fdb04985a749e7e84f051b5ae15a4837b535)
which means that every two adjacent polynomial pieces meet in their value and first n - 1 derivatives at each knot. The mathematical spline that most closely models the flat spline is a cubic (n = 3), twice continuously differentiable (C2), natural spline, which is a spline of this classical type with additional conditions imposed at endpoints a and b.
Reduced continuity
Another type of spline that is much used in graphics, for example in drawing programs such as Adobe Illustrator from Adobe Systems, has pieces that are cubic but has continuity only at most
- S(t)∈C1[a,b].displaystyle S(t)in mathrm C ^1[a,b].
![displaystyle S(t)in mathrm C ^1[a,b].](https://wikimedia.org/api/rest_v1/media/math/render/svg/b56b1ccf157f59e2b3245206a79a8ef784dfd6e1)
This spline type is also used in PostScript as well as in the definition of some computer typographic fonts.
Many computer-aided design systems that are designed for high-end graphics and animation use extended knot vectors, for example Maya from Alias. Computer-aided design systems often use an extended concept of a spline known as a non-uniform rational B-spline (NURBS).
Locally negative continuity
It might be asked what meaning more than n multiple knots in a knot vector have, since this would lead to continuities like
- S(t)∈C−m , m>0displaystyle S(t)in C^-mmbox , m>0

at the location of this high multiplicity. By convention, any such situation indicates a simple discontinuity between the two adjacent polynomial pieces. This means that if a knot ti appears more than n + 1 times in an extended knot vector, all instances of it in excess of the (n + 1)th can be removed without changing the character of the spline, since all multiplicities n + 1, n + 2, n + 3, etc. have the same meaning. It is commonly assumed that any knot vector defining any type of spline has been culled in this fashion.
General expression for a C2 interpolating cubic spline
The general expression for the ith C2 interpolating cubic spline at a point x with the natural condition can be found using the formula
- Si(x)=zi(x−ti−1)36hi+zi−1(ti−x)36hi+[f(ti)hi−zihi6](x−ti−1)+[f(ti−1)hi−zi−1hi6](ti−x)displaystyle S_i(x)=frac z_i(x-t_i-1)^36h_i+frac z_i-1(t_i-x)^36h_i+left[frac f(t_i)h_i-frac z_ih_i6right](x-t_i-1)+left[frac f(t_i-1)h_i-frac z_i-1h_i6right](t_i-x)
+left[frac f(t_i-1)h_i-frac z_i-1h_i6right](t_i-x)](https://wikimedia.org/api/rest_v1/media/math/render/svg/d98ff1b6da49994056e5bd034bad792c8f2dc7b5)
where
zi=f′′(ti)displaystyle z_i=f^prime prime (t_i)are the values of the second derivative at the ith knot.
- hi=ti−ti−1displaystyle h_i^=t_i-t_i-1
f(ti)displaystyle f(t_i^)are the values of the function at the ith knot.

Representations and names
For a given interval [a,b] and a given extended knot vector on that interval, the splines of degree n form a vector space. Briefly this means that adding any two splines of a given type produces spline of that given type, and multiplying a spline of a given type by any constant produces a spline of that given type. The dimension of the space containing all splines of a certain type can be counted from the extended knot vector:
- a=t0<t1=⋯=t1⏟j1<⋯<tk−2=⋯=tk−2⏟jk−2<tk−1=bdisplaystyle a=t_0<underbrace t_1=cdots =t_1 _j_1<cdots <underbrace t_k-2=cdots =t_k-2 _j_k-2<t_k-1=b
- ji≤n+1 , i=1,…,k−2.displaystyle j_ileq n+1~,~~i=1,ldots ,k-2.


The dimension is equal to the sum of the degree plus the multiplicities
- d=n+∑i=1k−2ji.displaystyle d=n+sum _i=1^k-2j_i.

If a type of spline has additional linear conditions imposed upon it, then the resulting spline will lie in a subspace. The space of all natural cubic splines, for instance, is a subspace of the space of all cubic C2 splines.
The literature of splines is replete with names for special types of splines. These names have been associated with:
- The choices made for representing the spline, for example:
- using basis functions for the entire spline (giving us the name B-splines)
- using Bernstein polynomials as employed by Pierre Bézier to represent each polynomial piece (giving us the name Bézier splines)
- The choices made in forming the extended knot vector, for example:
- using single knots for Cn-1 continuity and spacing these knots evenly on [a,b] (giving us uniform splines)
- using knots with no restriction on spacing (giving us nonuniform splines)
- Any special conditions imposed on the spline, for example:
- enforcing zero second derivatives at a and b (giving us natural splines)
- requiring that given data values be on the spline (giving us interpolating splines)
Often a special name was chosen for a type of spline satisfying two or more of the main items above. For example, the Hermite spline is a spline that is expressed using Hermite polynomials to represent each of the individual polynomial pieces. These are most often used with n = 3; that is, as cubic Hermite splines. In this degree they may additionally be chosen to be only tangent-continuous (C1); which implies that all interior knots are double. Several methods have been invented to fit such splines to given data points; that is, to make them into interpolating splines, and to do so by estimating plausible tangent values where each two polynomial pieces meet (giving us cardinal splines, Catmull–Rom splines, and Kochanek–Bartels splines, depending on the method used).
For each of the representations, some means of evaluation must be found so that values of the spline can be produced on demand. For those representations that express each individual polynomial piece Pi(t) in terms of some basis for the degree n polynomials, this is conceptually straightforward:
- For a given value of the argument t, find the interval in which it lies t∈[ti,ti+1]displaystyle tin [t_i,t_i+1]
- Look up the polynomial basis chosen for that interval P0,…,Pk−2displaystyle P_0,ldots ,P_k-2
- Find the value of each basis polynomial at t: P0(t),…,Pk−2(t)displaystyle P_0(t),ldots ,P_k-2(t)
- Look up the coefficients of the linear combination of those basis polynomials that give the spline on that interval c0, ..., ck-2
- Add up that linear combination of basis polynomial values to get the value of the spline at t:
![displaystyle tin [t_i,t_i+1]](https://wikimedia.org/api/rest_v1/media/math/render/svg/c74ba28db7893372d54339c022fa854065c38302)


- ∑j=0k−2cjPj(t).displaystyle sum _j=0^k-2c_jP_j(t).

However, the evaluation and summation steps are often combined in clever ways. For example, Bernstein polynomials are a basis for polynomials that can be evaluated in linear combinations efficiently using special recurrence relations. This is the essence of De Casteljau's algorithm, which features in Bézier curves and Bézier splines.
For a representation that defines a spline as a linear combination of basis splines, however, something more sophisticated is needed. The de Boor algorithm is an efficient method for evaluating B-splines.
History
Before computers were used, numerical calculations were done by hand. Although piecewise-defined functions like the sign function or step function were used, polynomials were generally preferred because they were easier to work with. Through the advent of computers splines have gained importance. They were first used as a replacement for polynomials in interpolation, then as a tool to construct smooth and flexible shapes in computer graphics.

A wooden spline
It is commonly accepted that the first mathematical reference to splines is the 1946 paper by Schoenberg, which is probably the first place that the word "spline" is used in connection with smooth, piecewise polynomial approximation. However, the ideas have their roots in the aircraft and shipbuilding industries. In the foreword to (Bartels et al., 1987), Robin Forrest describes "lofting", a technique used in the British aircraft industry during World War II to construct templates for airplanes by passing thin wooden strips (called "splines") through points laid out on the floor of a large design loft, a technique borrowed from ship-hull design. For years the practice of ship design had employed models to design in the small. The successful design was then plotted on graph paper and the key points of the plot were re-plotted on larger graph paper to full size. The thin wooden strips provided an interpolation of the key points into smooth curves. The strips would be held in place at discrete points (called "ducks" by Forrest; Schoenberg used "dogs" or "rats") and between these points would assume shapes of minimum strain energy. According to Forrest, one possible impetus for a mathematical model for this process was the potential loss of the critical design components for an entire aircraft should the loft be hit by an enemy bomb. This gave rise to "conic lofting", which used conic sections to model the position of the curve between the ducks. Conic lofting was replaced by what we would call splines in the early 1960s based on work by J. C. Ferguson at Boeing and (somewhat later) by M. A. Sabin at British Aircraft Corporation.
The word "spline" was originally an East Anglian dialect word.[citation needed]
The use of splines for modeling automobile bodies seems to have several independent beginnings. Credit is claimed on behalf of de Casteljau at Citroën, Pierre Bézier at Renault, and Birkhoff, Garabedian, and de Boor at General Motors (see Birkhoff and de Boor, 1965), all for work occurring in the very early 1960s or late 1950s. At least one of de Casteljau's papers was published, but not widely, in 1959. De Boor's work at General Motors resulted in a number of papers being published in the early 1960s, including some of the fundamental work on B-splines.
Work was also being done at Pratt & Whitney Aircraft, where two of the authors of (Ahlberg et al., 1967)—the first book-length treatment of splines—were employed, and the David Taylor Model Basin, by Feodor Theilheimer. The work at General Motors is detailed nicely in (Birkhoff, 1990) and (Young, 1997). Davis (1997) summarizes some of this material.
References
Schoenberg, Isaac J. (1946). "Contributions to the Problem of Approximation of Equidistant Data by Analytic Functions: Part A.—On the Problem of Smoothing or Graduation. A First Class of Analytic Approximation Formulae" (PDF). Quarterly of Applied Mathematics. 4 (2): 45–99..mw-parser-output cite.citationfont-style:inherit.mw-parser-output .citation qquotes:"""""""'""'".mw-parser-output .citation .cs1-lock-free abackground:url("//upload.wikimedia.org/wikipedia/commons/thumb/6/65/Lock-green.svg/9px-Lock-green.svg.png")no-repeat;background-position:right .1em center.mw-parser-output .citation .cs1-lock-limited a,.mw-parser-output .citation .cs1-lock-registration abackground:url("//upload.wikimedia.org/wikipedia/commons/thumb/d/d6/Lock-gray-alt-2.svg/9px-Lock-gray-alt-2.svg.png")no-repeat;background-position:right .1em center.mw-parser-output .citation .cs1-lock-subscription abackground:url("//upload.wikimedia.org/wikipedia/commons/thumb/a/aa/Lock-red-alt-2.svg/9px-Lock-red-alt-2.svg.png")no-repeat;background-position:right .1em center.mw-parser-output .cs1-subscription,.mw-parser-output .cs1-registrationcolor:#555.mw-parser-output .cs1-subscription span,.mw-parser-output .cs1-registration spanborder-bottom:1px dotted;cursor:help.mw-parser-output .cs1-ws-icon abackground:url("//upload.wikimedia.org/wikipedia/commons/thumb/4/4c/Wikisource-logo.svg/12px-Wikisource-logo.svg.png")no-repeat;background-position:right .1em center.mw-parser-output code.cs1-codecolor:inherit;background:inherit;border:inherit;padding:inherit.mw-parser-output .cs1-hidden-errordisplay:none;font-size:100%.mw-parser-output .cs1-visible-errorfont-size:100%.mw-parser-output .cs1-maintdisplay:none;color:#33aa33;margin-left:0.3em.mw-parser-output .cs1-subscription,.mw-parser-output .cs1-registration,.mw-parser-output .cs1-formatfont-size:95%.mw-parser-output .cs1-kern-left,.mw-parser-output .cs1-kern-wl-leftpadding-left:0.2em.mw-parser-output .cs1-kern-right,.mw-parser-output .cs1-kern-wl-rightpadding-right:0.2em
Schoenberg, Isaac J. (1946). "Contributions to the Problem of Approximation of Equidistant Data by Analytic Functions: Part B.—On the Problem of Osculatory Interpolation. A Second Class of Analytic Approximation Formulae" (PDF). Quarterly of Applied Mathematics. 4 (2): 112–141.
Ferguson, James C. (1964). "Multivariable Curve Interpolation". Journal of the ACM. 11 (2): 221–228. doi:10.1145/321217.321225.
Ahlberg, J. Harold; Nielson, Edwin N.; Walsh, Joseph L. (1967). The Theory of Splines and Their Applications. New York: Academic Press. ISBN 0-12-044750-9.
Birkhoff (1990). "Fluid dynamics, reactor computations, and surface representation". In Nash, Steve. A History of Scientific Computation. Reading: Addison-Wesley. ISBN 0-201-50814-1.
Bartels, Richard H.; Beatty, Brian A.; Barsky, John C. (1987). An Introduction to Splines for Use in Computer Graphics and Geometric Modeling. San Mateo: Morgan Kaufmann. ISBN 0-934613-27-3.
Birkhoff; de Boor (1965). "Piecewise polynomial interpolation and approximation". In Garabedian, H. L. Proc. General Motors Symposium of 1964. New York and Amsterdam: Elsevier. pp. 164–190.
Davis (1997). "B-splines and Geometric design". SIAM News. 29 (5).
Epperson (1998). "History of Splines". NA Digest. 98 (26).
Stoer; Bulirsch. Introduction to Numerical Analysis. New York: Springer-Verlag. pp. 93–106. ISBN 0-387-90420-4.
Schoenberg (1946). "Contributions to the problem of approximation of equidistant data by analytic functions". Quart. Appl. Math. 4: 45–99 and 112–141.
Young (1997). "Garrett Birkhoff and applied mathematics". Notices of the AMS. 44 (11): 1446–1449.
Chapra; Canale (2006). Numerical Methods for Engineers (5th ed.). Boston: McGraw-Hill. ISBN 0-07-291873-X.
- Specific
^ Wegman, Edward J., and Ian W. Wright (1983). "Splines in statistics". Journal of the American Statistical Association. 78 (382): 351–365. JSTOR 2288640.CS1 maint: Multiple names: authors list (link)
External links
Theory
Cubic Splines Module Prof. John H. Mathews California State University, Fullerton
An Interactive Introduction to Splines, ibiblio.org
Excel Function
- XLL Excel Addin Function Implementation of cubic spline
Online utilities
- Online Cubic Spline Interpolation Utility
Learning by Simulations Interactive simulation of various cubic splines
Symmetrical Spline Curves, an animation by Theodore Gray, The Wolfram Demonstrations Project, 2007.
Exploring Bezier and Spline Curves, an interactive web app
Computer Code
Notes, PPT, Mathcad, Maple, Mathematica, Matlab, Holistic Numerical Methods Institute
various routines, NTCC
Sisl: Opensource C-library for NURBS, SINTEF
VBA Spline Interpolation, vbnumericalmethods.com


